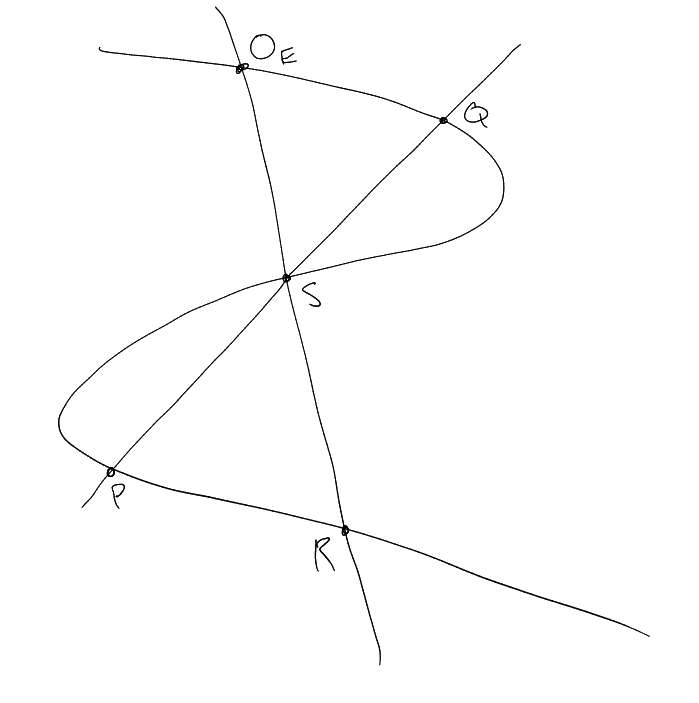
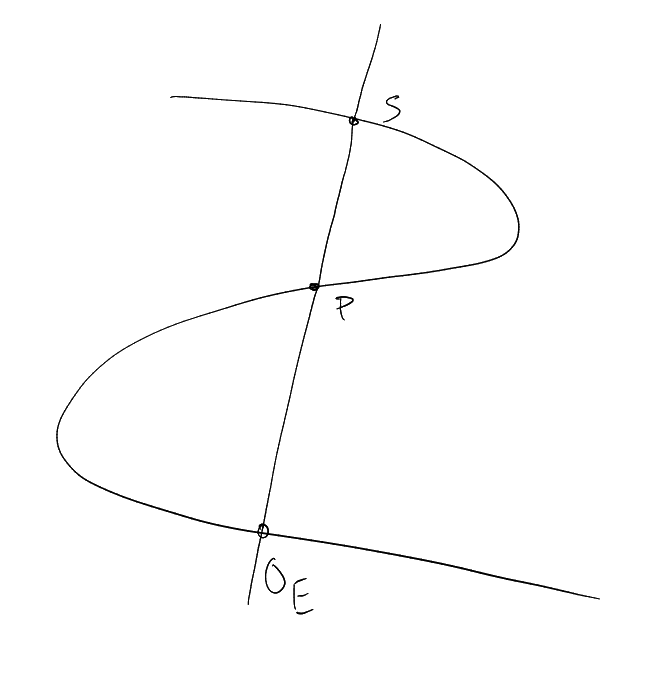
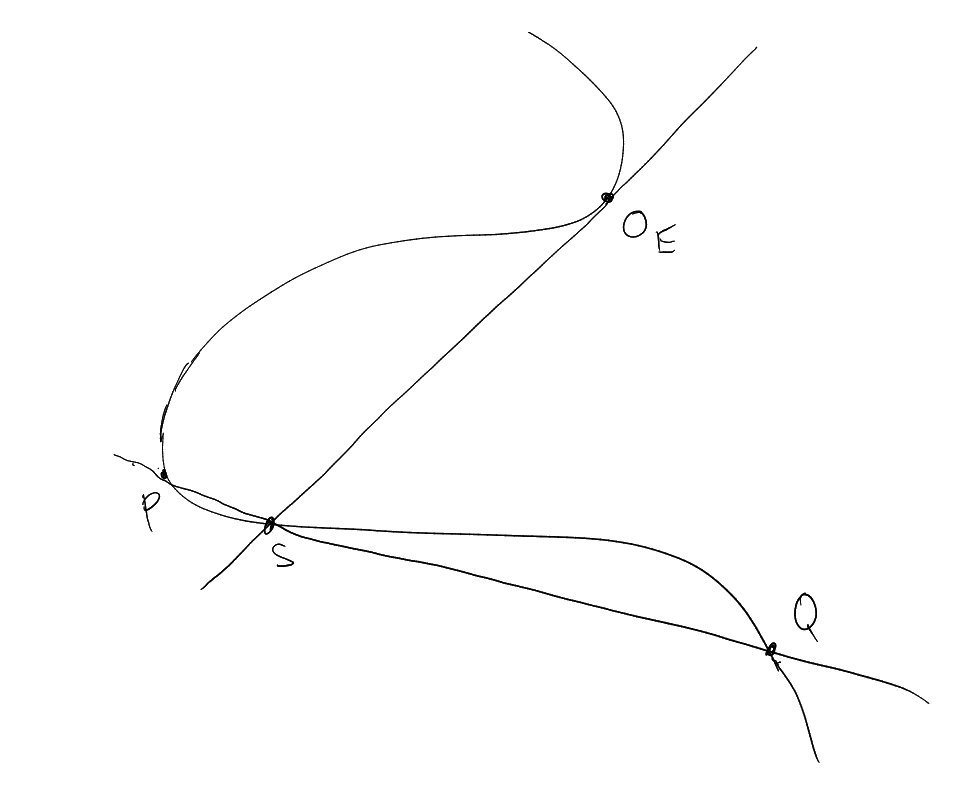
4 The Group Law
Let be a smooth
plane cubic, and .
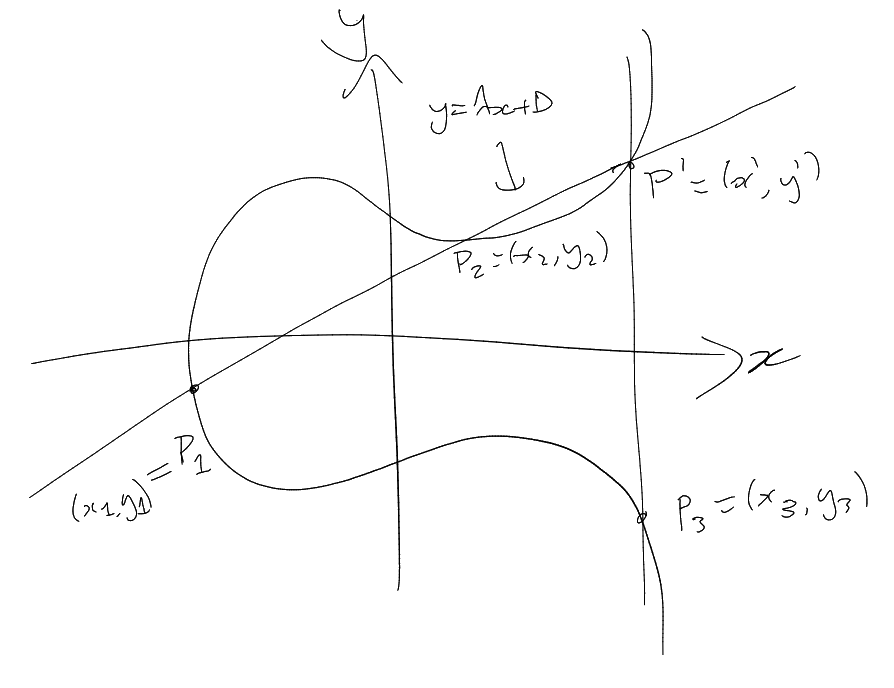
meets
any line in 3 points counted with multiplicity.
Let be the third point
of intersection of
with , and
be the third
intersection point of
and .
Define .
If then take
instead
of
etc.
This is called the “chord and tangent process”.
Theorem 4.1.
is an abelian group.
Note.
here means
. As mentioned before,
we only ever mean “over ”
if it is explicitly mentioned (otherwise we are always working “over
”).
Definition (Linearly equivalent).
are linearly equivalent if there exists
such that .
Write
and .
Definition.
,
.
where .
Proposition 4.2.
Assuming that:
-
we define
Then
-
(i)
.
-
(ii)
is a bijection.
Proof.
-
(i)
Hence .
Therefore .
So .
-
(ii)
Injectivity: Suppose
with .
Then there exists
such that , so
has degree
1, hence ,
contradiction.
Note: We now compute
|
|
hence for
all (using
injectivity). So
is associative.
-
(iii)
Surjectivity: Let .
Then has
degree .
Riemann Roch gives .
So there exists
such that
|
|
So
for some .
Then ,
so .
□
Formulae for
in Weierstrass form
|
|
.
.
.
Substituting into
()
and looking
at coefficient of
gives
Therefore
It remains to find formulae for
and .
Corollary 4.3.
is an abelian group.
Proof.
It is a subgroup of .
Identity
by definition.
Closure / inverses: see formulae above.
Associative / commutative: inherited. □
Theorem 4.4.
Elliptic curves are group varieties, i.e.
;
and
;
are
morphisms of algebraic varieties.
Proof.
-
(i)
Above formulae imply
is a rational map, and hence a morphism (by Remark 2.9).
-
(ii)
Above formulae imply
is a rational map regular on
|
|
For ,
let ;
“translation by ”.
is a rational map, and hence a morphism (by Remark 2.9).
Take any .
We factor
as
This shows
is regular on
for all .
Therefore
is regular on .
□
Statement of Results
The isomorphisms in (i), (ii), (iv) respect the relevant topologies.
-
(i)
,
(
is a lattice).
-
(ii)
.
Then
|
|
-
(iii)
(field
with
elements). Then
(Hasse’s Theorem).
-
(iv)
,
ring of integers .
has a subgroup of finite index which is isomorphic to .
-
(v)
.
is a finitely generated abelian group (Mordell-Weil Theorem).
Brief remarks on the case
Let
where a
basis for as
an -vector
space.
Then
|
|
The function field of
is generated by
These satisfy
for some depending
only on .
One shows (isomorphism as groups
and as Riemann surfaces) where :
.
Theorem (Uniformisation Theorem).
Every elliptic curve over
arises
this way (one proof uses modular forms).
Definition.
For ,
let be
defined by
for ,
and .
Definition (-torsion subgroup).
The -torsion
subgroup of
is
If then
.
Therefore
|
|
We’ll show (2) holds over any field ,
and (1) holds if .
Lemma 4.5.
Assuming that:
Then .
Proof.
Let .
Then